未来,机器人或能帮你“清理”血管
微创血管介入手术中要求对导管、导丝等介入器械高精度递送。 目前在微创血管介入手术中,按导管或导丝远端所处血管部位,将介入器械递送过程分为三个阶段:1)主动脉阶段:导丝或导管远端位于主动脉,需快速前送,以减少X射线和造影剂的使用;2)冠脉入口阶段:导丝或导管远端进入冠脉,此时需选择相应的病变冠脉分支;3)冠脉病变阶段:导丝或导管远端位于狭窄病变部位,需要高精度操作才能使导丝或导管穿过狭窄病变。 在
微创血管介入手术中要求对导管、导丝等介入器械高精度递送。
目前在微创血管介入手术中,按导管或导丝远端所处血管部位,将介入器械递送过程分为三个阶段:1)主动脉阶段:导丝或导管远端位于主动脉,需快速前送,以减少X射线和造影剂的使用;2)冠脉入口阶段:导丝或导管远端进入冠脉,此时需选择相应的病变冠脉分支;3)冠脉病变阶段:导丝或导管远端位于狭窄病变部位,需要高精度操作才能使导丝或导管穿过狭窄病变。
在血管里穿行,每行进一毫米都要微米不差:经过主动脉,必须快速通过,以减少X射线和造影剂的使用。经过狭窄病变部位,需要高精度操作才能使导丝或导管穿过狭窄病变。
得益于机器人技术的高精度、可远程操作等特点,血管介入手术机器人的研制受到了极大关注。
高精准度、速度、策略,在机器人“养成”的过程中一个也不能少。“血管介入手术中,医生手指搓捻导丝时,手指关节的屈伸角度和推送导丝时手部的空间位置及方位都是影响手术成功的关键因素。”中国科学院自动化研究所复杂系统管理与控制国家重点实验室研究人员奉振球说,为此,研究团队利用光纤数据手套,通过对人手骨骼和手指关节运动规律的分析,提出了一种手指屈伸角度识别的方法,建立了手指屈伸角度与数据手套输出的映射关系。
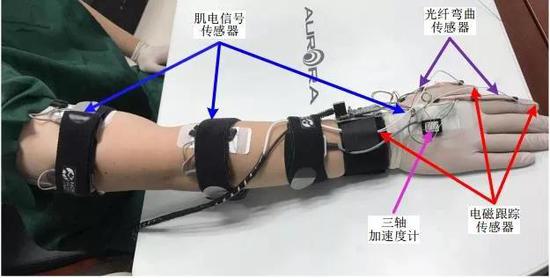
图2 数据手套
“我们根据这个方法,解决了数据手套输出实用性不明确的问题,进行了屈伸角度实验并验证了方法的有效性。还通过引入电磁跟踪传感器,对传统的数据手套进行改良。”奉振球说,这将弥补目前的血管介入机器人缺少触觉反馈或者触觉反馈不够精细的缺陷,使得医生在机器人的操作端拥有真实精细的触觉。
综合评价,推动技能培训和临床实践应用
这些介入器械,尤其是导引导丝,由于直径小、柔韧性强,导致冠脉介入手术的操作难度很大。团队在多年研究的过程中还发现,冠脉介入手术成功率很大程度上取决于医生的操作技能和灵巧的操作策略。因此,探索有效的技能评价方法将有助于技能培训和临床实践应用。
团队提出了一种基于操作行为融合的介入操作技能综合评价,用于介入手术技能培训和临床实践应用。
团队通过与复旦大学附属华东医院、上海微创医疗开展合作进行了实验。通过肌电信号传感器、电磁跟踪传感器、光纤弯曲传感器和3D加速度计,成功采集了多位初级医生、高级医生在介入手术中的操作行为。然后,利用非参数检验方法对不同技能组别的行为特征进行差异性分析,获得了用于技能评价的有效操作行为。
实验结果表明,在血管分叉的情况下,高级医生根据其临床实践经验,可以较容易地感知导丝运动和血管形态,从而可以减少导丝递送过程中的手指运动。但是,初级医生必须依靠搓捻和推送的同时操作才能达到递送的目的,导致手指搓捻操作的次数大大增加。
肌肉活动方面,介入医生的主操作手在搓捻导丝时,其拇短展肌(APB)表现出非常明显的动态特性。对导丝递送较为熟练的高级医生在操作过程中只涉及到少量的拇短展肌活动,而初级医生则相反。
另外,无论是对于单一技能组医生的操作,还是多种技能水平组医生的操作,团队提出的QTAS得分与修改后的GRS评分之间都存在着较高的正相关关系,这说明提出的基于操作行为融合的定量评价方法可以代替传统的总体评价量表应用于临床手术的技能评价中。
前景和展望
随着5G时代的来临,微创血管介入机器人将可以实现远程、跨区域治疗,机器人通过结合高级医生的手术经验,在偏远地区为患者提供高质量的治疗。此外,通过对手术导航技术进行深入研究,在不远的将来,介入手术机器人将可以实现自动送丝操作,进一步提高治疗质量,为广大患者带来福音。
相关文章
评论

 我要跟帖
我要跟帖



